Marble sorter
Problem/constraints
The following is a direct excerpt of the design problem/simulation that our group was faced with:
Problem Statement:
The National Recreation Park Association (NRPA) has asked your team to develop a solution to a growing problem in their parks. The association has placed dumpsters for recyclable material throughout the parks. They have a sorting facility; however, they need the device that will sort the recyclable material.
Design Statement:
Design, model, and test a device that will separate recyclable
POE – Unit 3 – Lesson 3.3 – Problem 3.3.1 Design Problem – Page 1
POE – Unit 3 – Lesson 3.3 – Problem 3.3.1 Design Problem – Page 2
materials.
Constraints:
1. Separation process must be fully automated.
2. Must successfully separate commingled recyclable materials into individual holding bins.
3. Recyclable materials include 3 different ½ in. material spheres totaling 15. Examples could include steel, aluminum, wood, opaque plastic, and clear plastic.
4. Must be efficient – 2 minute max for completion of sorting process.
The National Recreation Park Association (NRPA) has asked your team to develop a solution to a growing problem in their parks. The association has placed dumpsters for recyclable material throughout the parks. They have a sorting facility; however, they need the device that will sort the recyclable material.
Design Statement:
Design, model, and test a device that will separate recyclable
POE – Unit 3 – Lesson 3.3 – Problem 3.3.1 Design Problem – Page 1
POE – Unit 3 – Lesson 3.3 – Problem 3.3.1 Design Problem – Page 2
materials.
Constraints:
1. Separation process must be fully automated.
2. Must successfully separate commingled recyclable materials into individual holding bins.
3. Recyclable materials include 3 different ½ in. material spheres totaling 15. Examples could include steel, aluminum, wood, opaque plastic, and clear plastic.
4. Must be efficient – 2 minute max for completion of sorting process.
Brainstorming/ideas
After being presented with the design constraints, our group was certain of 2 things. We wanted to use a magnet to somehow remove the steel marbles. The use of one "physical" sorting action would greatly simplify the coding and building process. This was imperative as we were pressed for time with this build. We also wanted to design a custom piece that conformed perfectly to the marble in order to allow for smooth and single-file dispersion.
Other than that we were open to a lot of different possibilities. This list below contains different methods of sorting that we liked and that we could combine into a machine.
Sorting out the Steel Magnetically:
We had essentially two options for this:
1) Use a fixed magnet to remove the steel marbles as they passed by
Other than that we were open to a lot of different possibilities. This list below contains different methods of sorting that we liked and that we could combine into a machine.
Sorting out the Steel Magnetically:
We had essentially two options for this:
1) Use a fixed magnet to remove the steel marbles as they passed by

2) Use a magnet set over and equaling the dimensions of a platform large enough for all the marbles to lay flat (not on top of one another) that would then come down, lift off the steel marbles and then drop them into a bin.

Ideas for sorting the two remaining types of marbles:
1) Use a light sensor and a flashlight directed at the marbles to differentiate between 2 types of marbles
1) Use a light sensor and a flashlight directed at the marbles to differentiate between 2 types of marbles

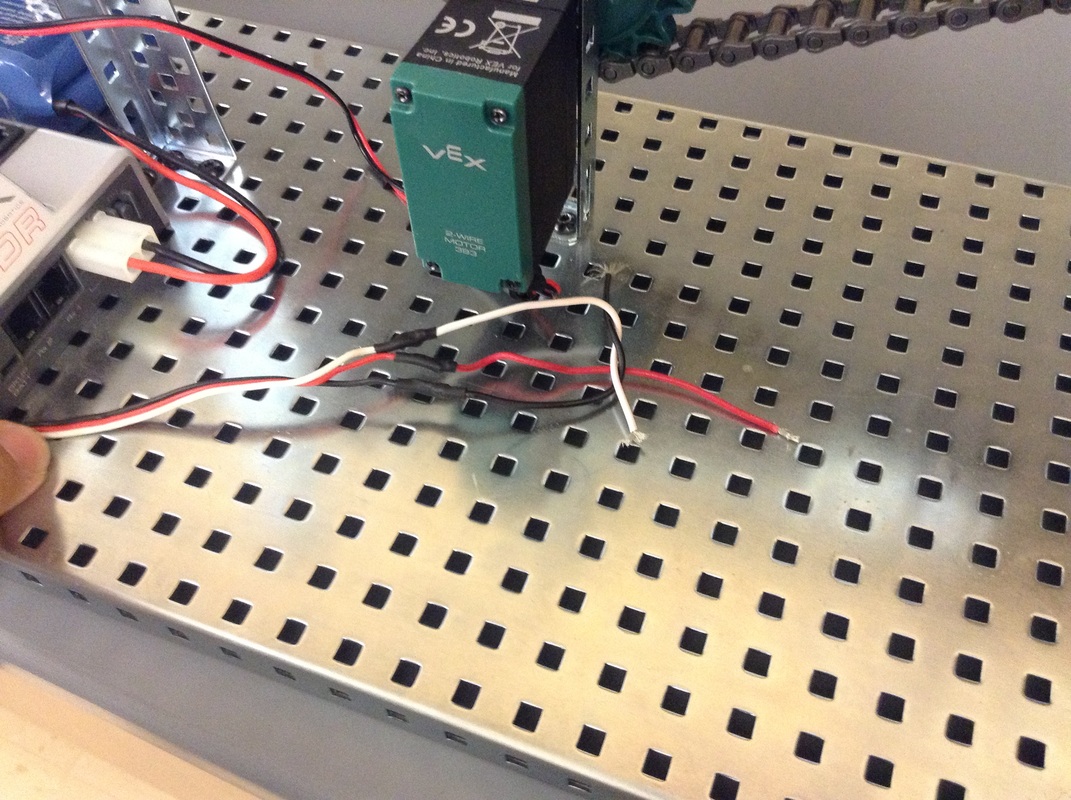
2) Use Conductivity. For this we would need two wires (one charged and one to complete the circuit) to differentiate between aluminum and either wood or glass.

Ideas for guiding sorted marbles
As a base for this, we established that it would be prudent to use a conveyor belt of sorts to regulate the speed of the marbles. This would remove the potential problem of having one type of marble roll faster than the other and mess up our timing.
1) Use a servo to guide a platform to one of two bins stacked on top of one another
As a base for this, we established that it would be prudent to use a conveyor belt of sorts to regulate the speed of the marbles. This would remove the potential problem of having one type of marble roll faster than the other and mess up our timing.
1) Use a servo to guide a platform to one of two bins stacked on top of one another

2) Use a servo to guide a platform to one of two bins stacked on either side of the platform

With two options for each stage that could all be combined, we had now 12 different combinations available to us.
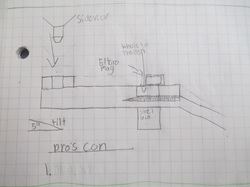
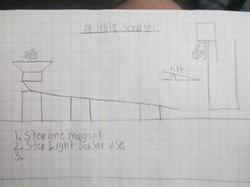
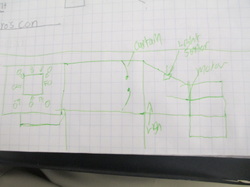
HAND SKETCHING
These are picture of some of our sketches with ideas that we tossed around.
These are picture of some of our sketches with ideas that we tossed around.
choosing a design
For our final design we decided upon the following:
1) We would use a fixed magnet to remove the steel marbles. We chose this because it would greatly simplify our build design and code design. When things are simpler, there is less that can go wrong and on a project like this we wanted to minimize mistakes and backtracking.
2) We would sort aluminum and wood marbles from each other using conductivity. The use of conductivity provides repeatable results in contrast with a light sensor. With a light sensor we would have to worry about not only all of the angles, and getting the marble stopped and going again to get a consistent read, but there would be the huge problem of the changing brightness of outside light and having to constantly readjust coding accordingly. Also, conductivity is a very unique and original design that we thought would set us apart from our classmates.
3) We would use the second listed option for distributing the marbles, a horizontal layout. This is a simpler layout to design and we would not have to worry about building the entire machine on two stories.
1) We would use a fixed magnet to remove the steel marbles. We chose this because it would greatly simplify our build design and code design. When things are simpler, there is less that can go wrong and on a project like this we wanted to minimize mistakes and backtracking.
2) We would sort aluminum and wood marbles from each other using conductivity. The use of conductivity provides repeatable results in contrast with a light sensor. With a light sensor we would have to worry about not only all of the angles, and getting the marble stopped and going again to get a consistent read, but there would be the huge problem of the changing brightness of outside light and having to constantly readjust coding accordingly. Also, conductivity is a very unique and original design that we thought would set us apart from our classmates.
3) We would use the second listed option for distributing the marbles, a horizontal layout. This is a simpler layout to design and we would not have to worry about building the entire machine on two stories.
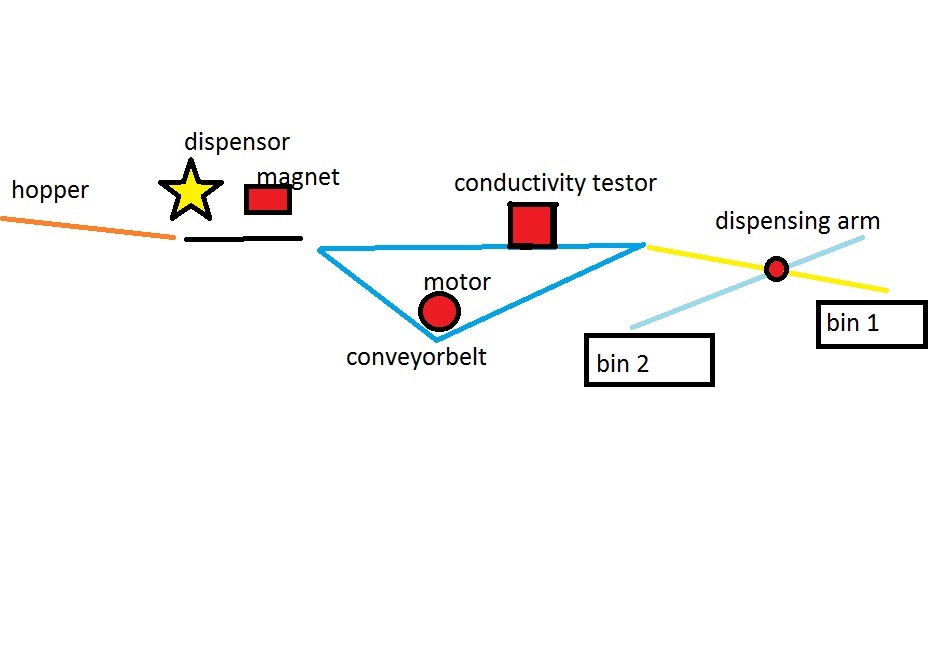
final design preliminary sketch
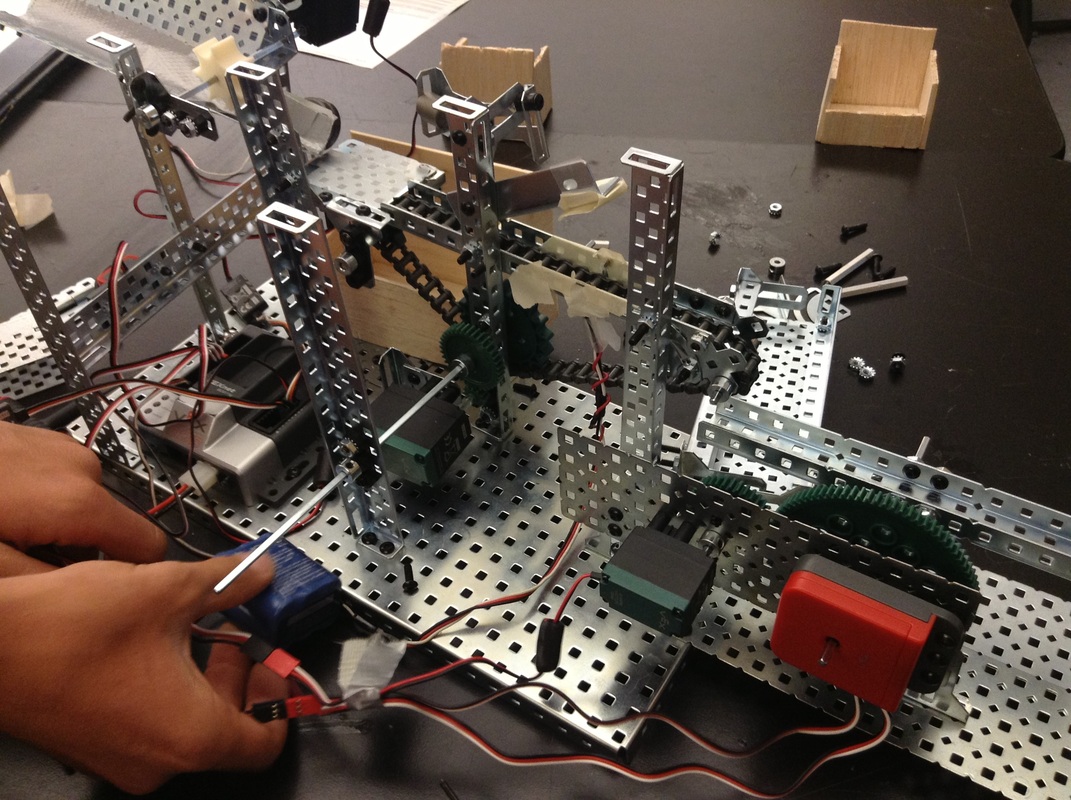
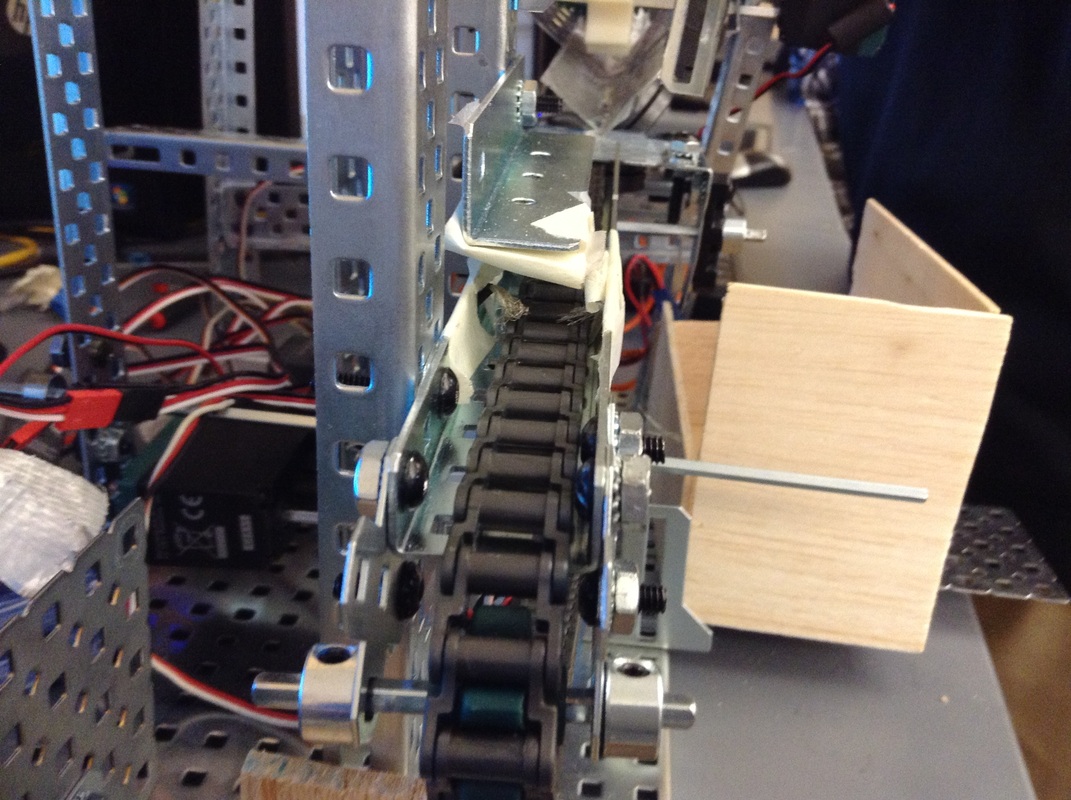
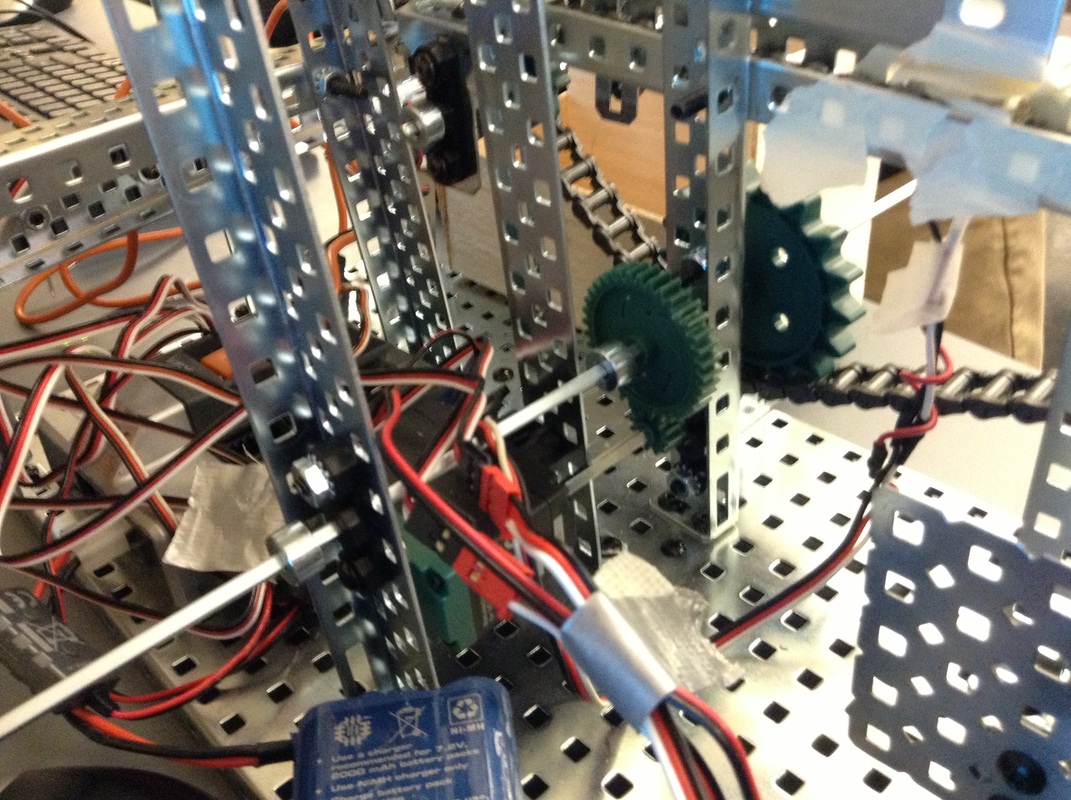
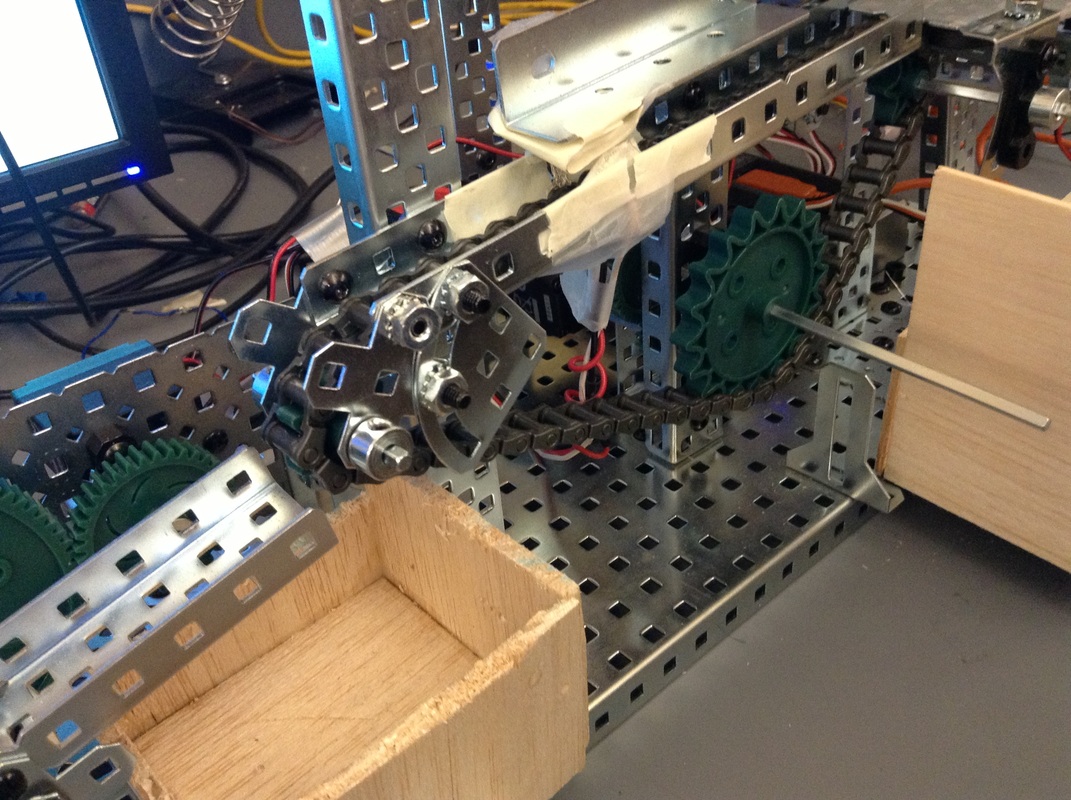
documentation
Click on image for larger view, most have a description as well.
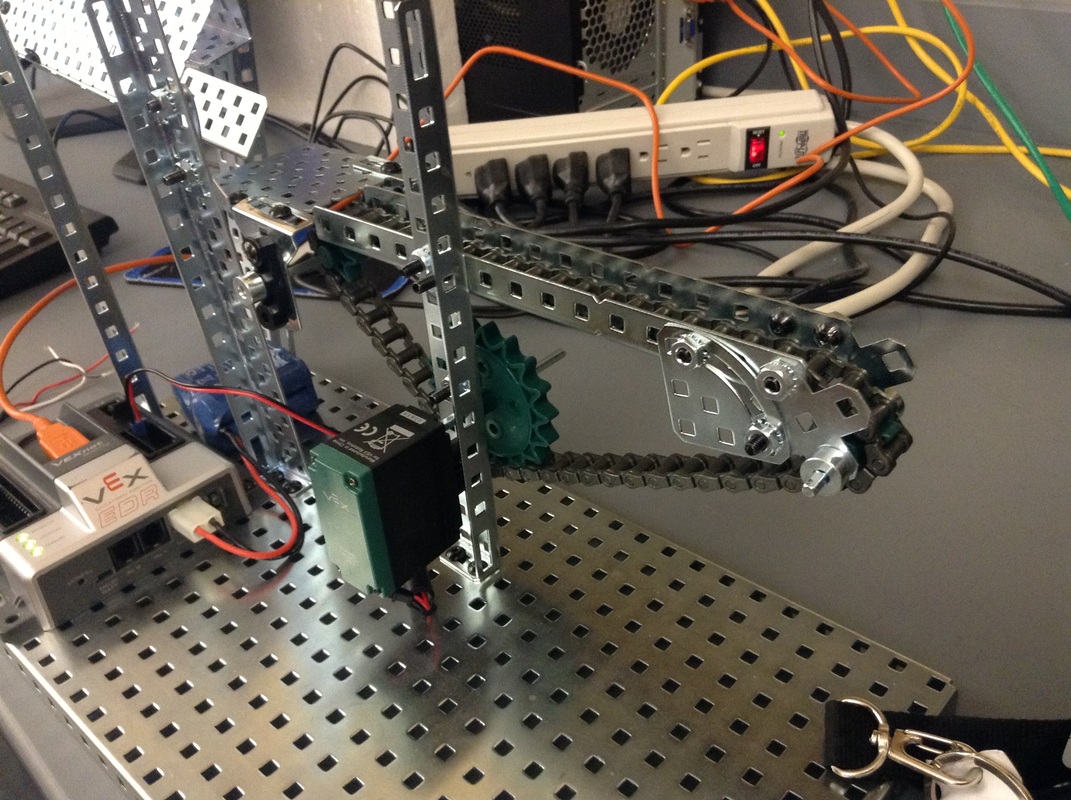
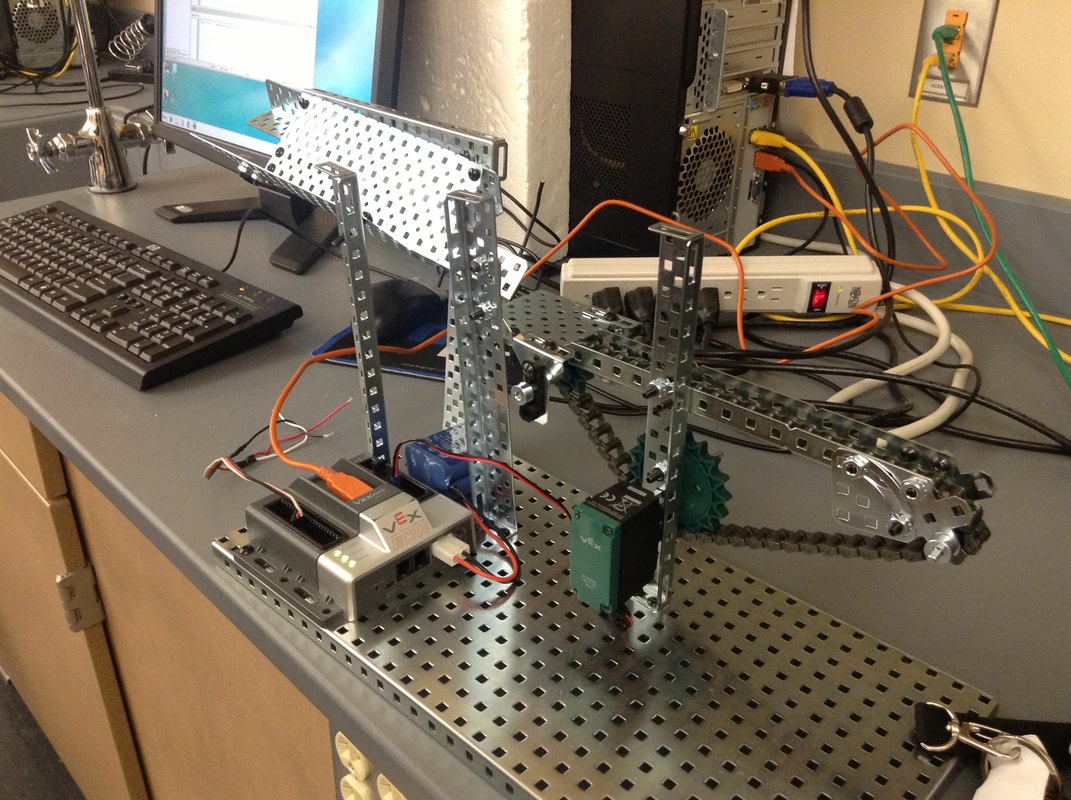
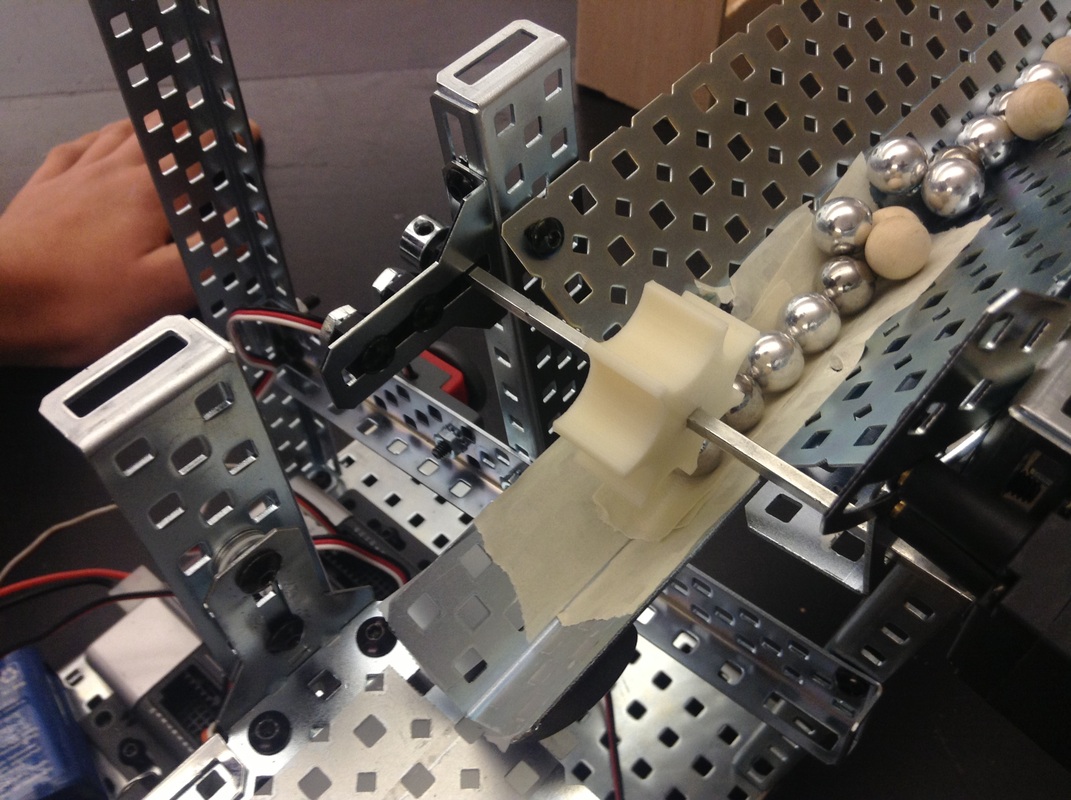
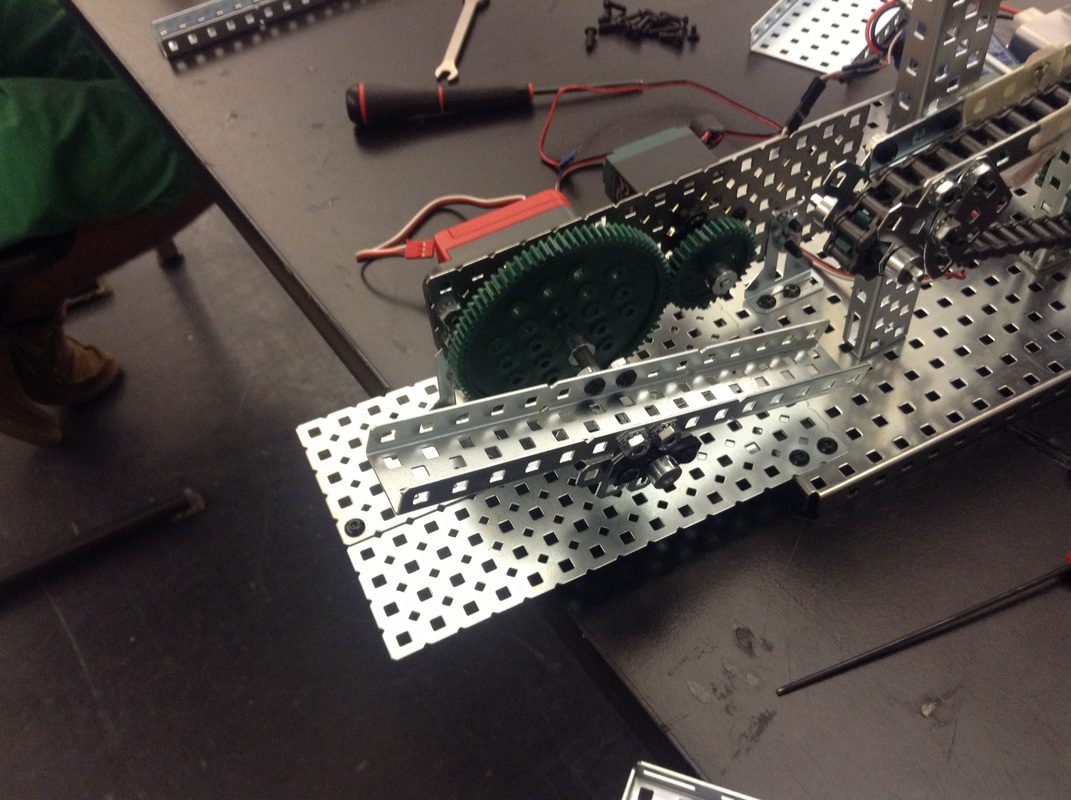

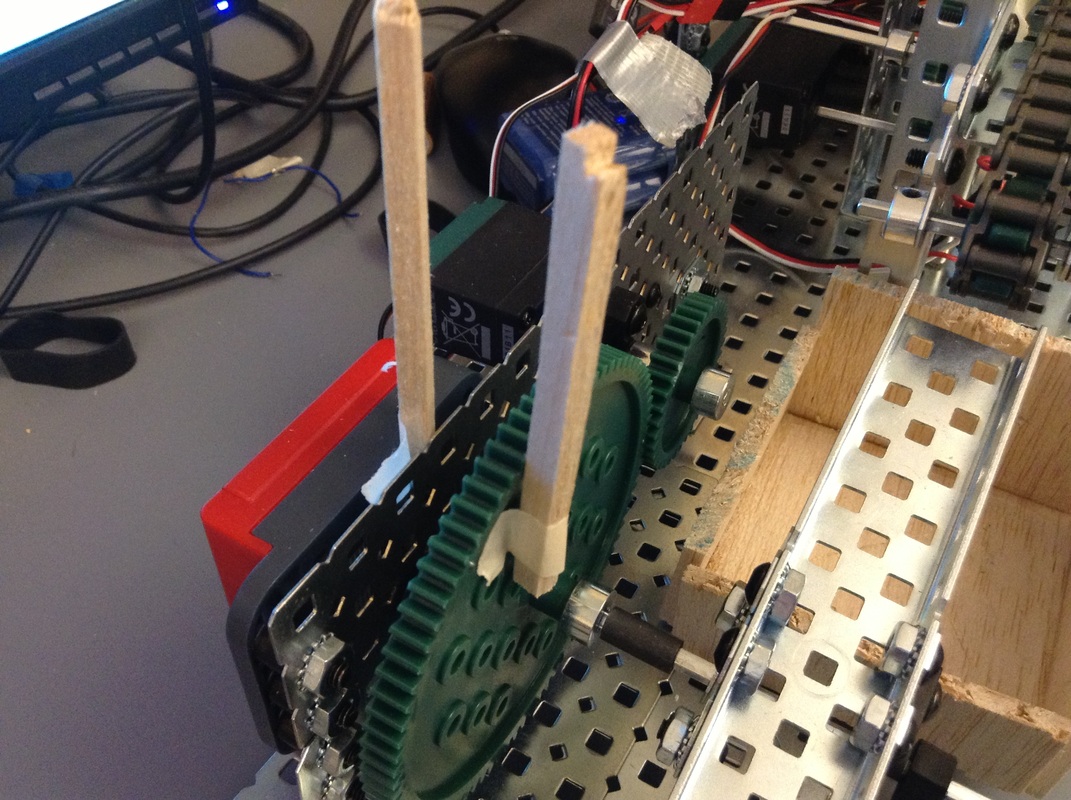
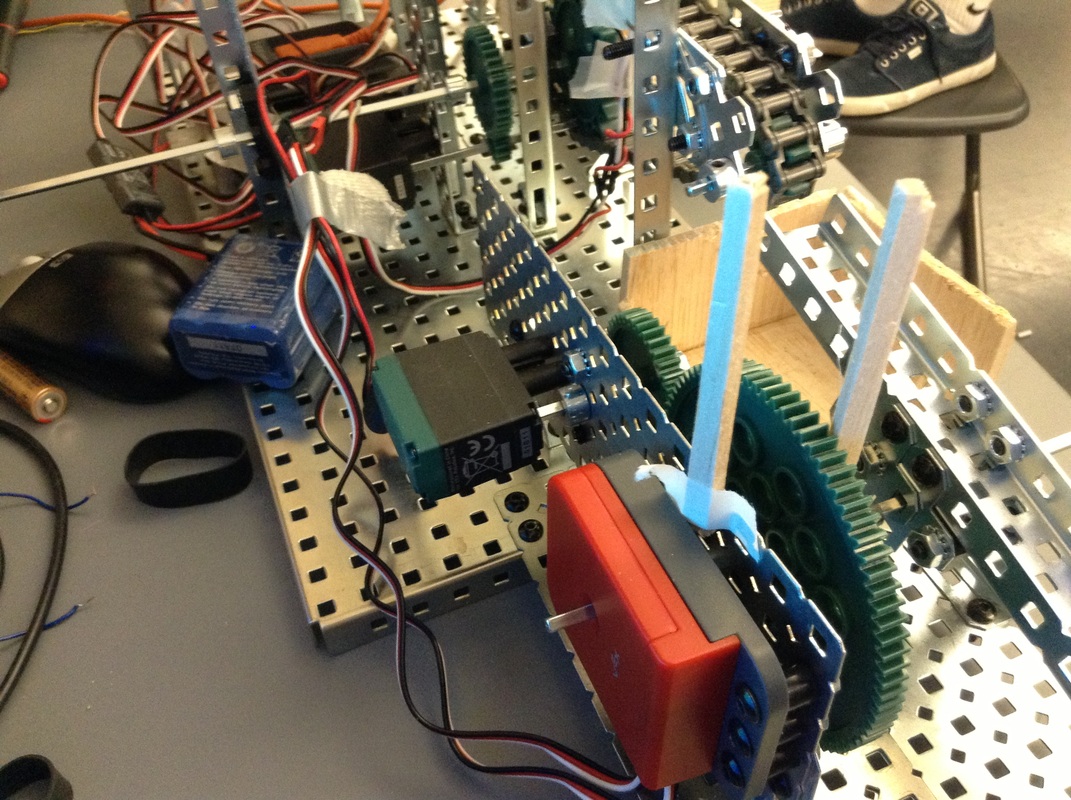
Initial testing of the dispenser, magnet and conveyor belt. The arm was not operational at the time.
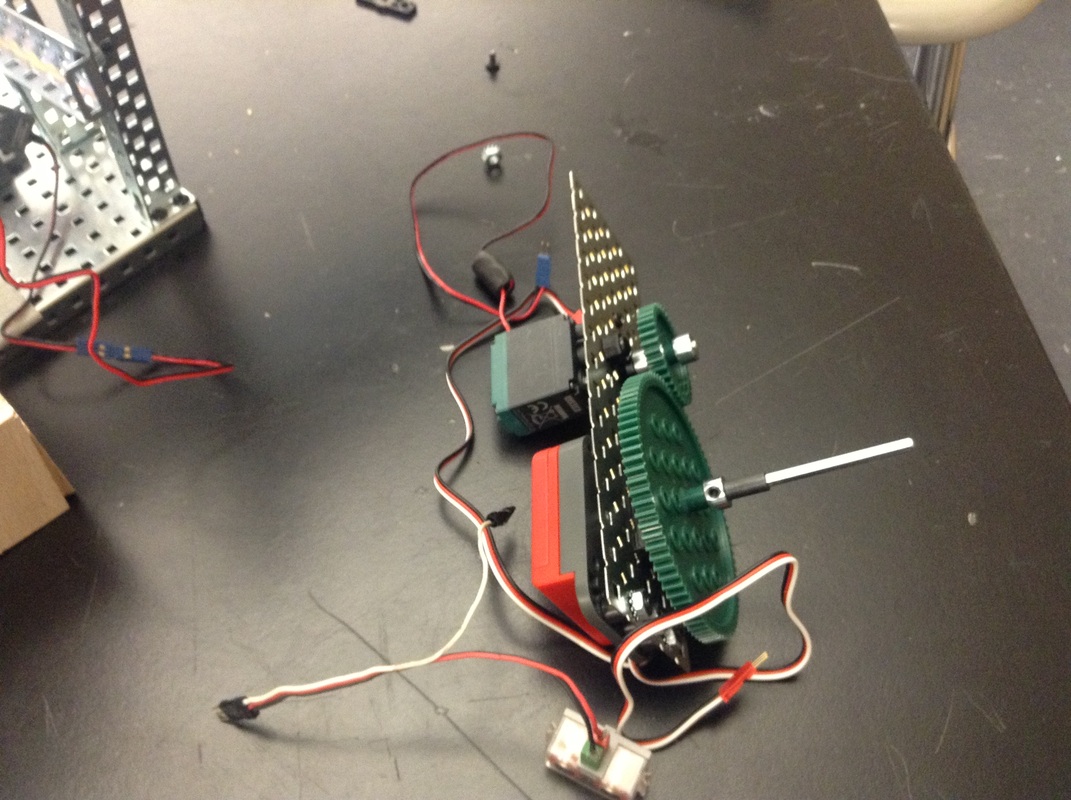
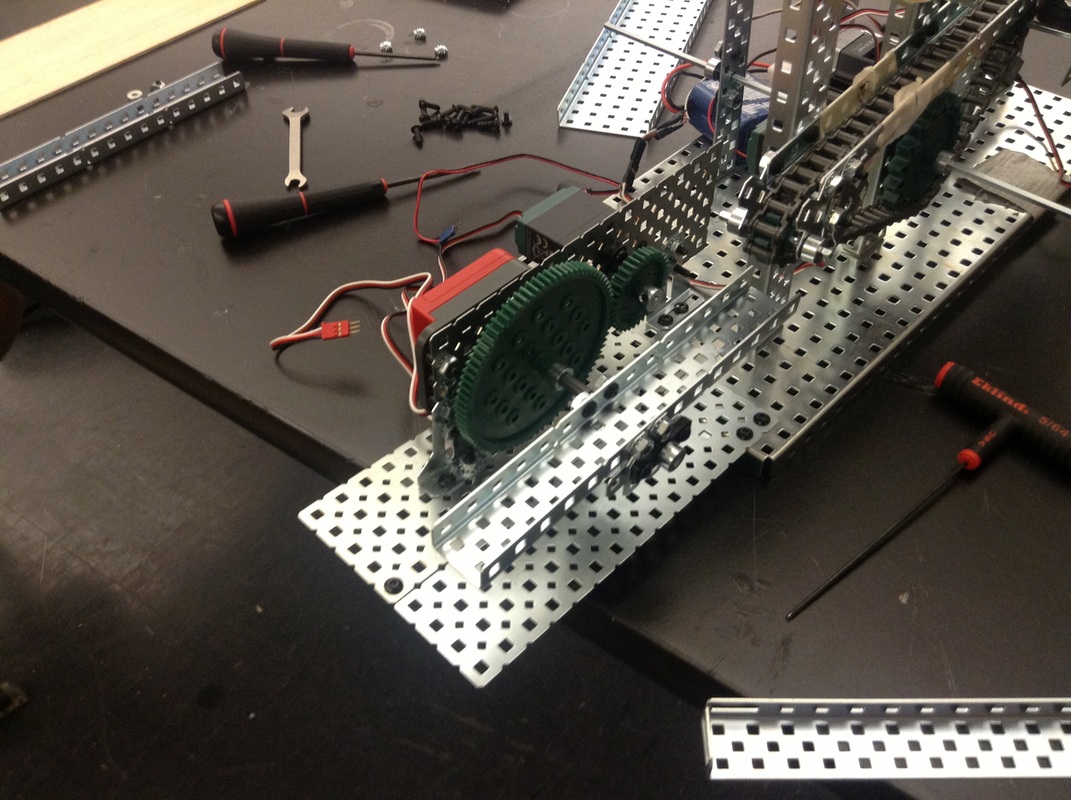
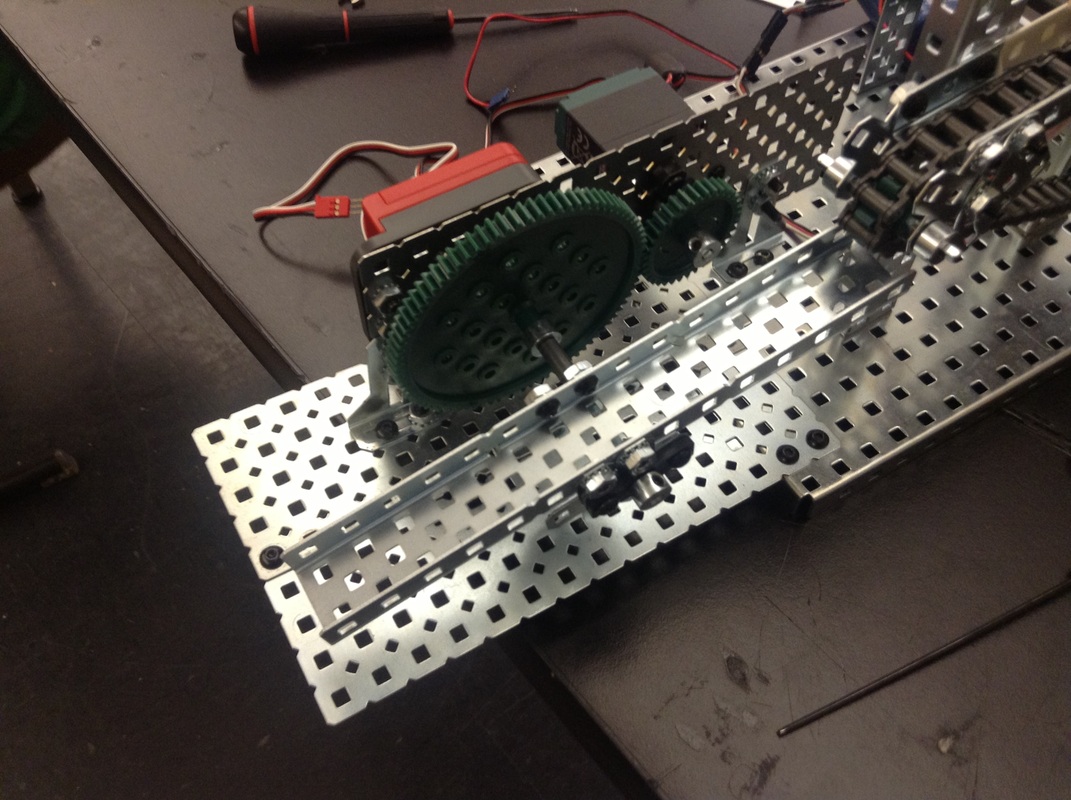
Video of someone in my group explaining the operation of each piece of the marble sorter.
This is a video of some testing that we ran. We still had a number of issues at the time (mostly magnet), but it does provide a good view of the working machine.
This was the most successful run that I got on video. Believe it or not it did work perfectly multiple times, just not when I had the camera in my hands. The only issues were that one steel marble got stuck on the magnet, and one or two did not make it into the bin.
Pseudocode

final results/reflection
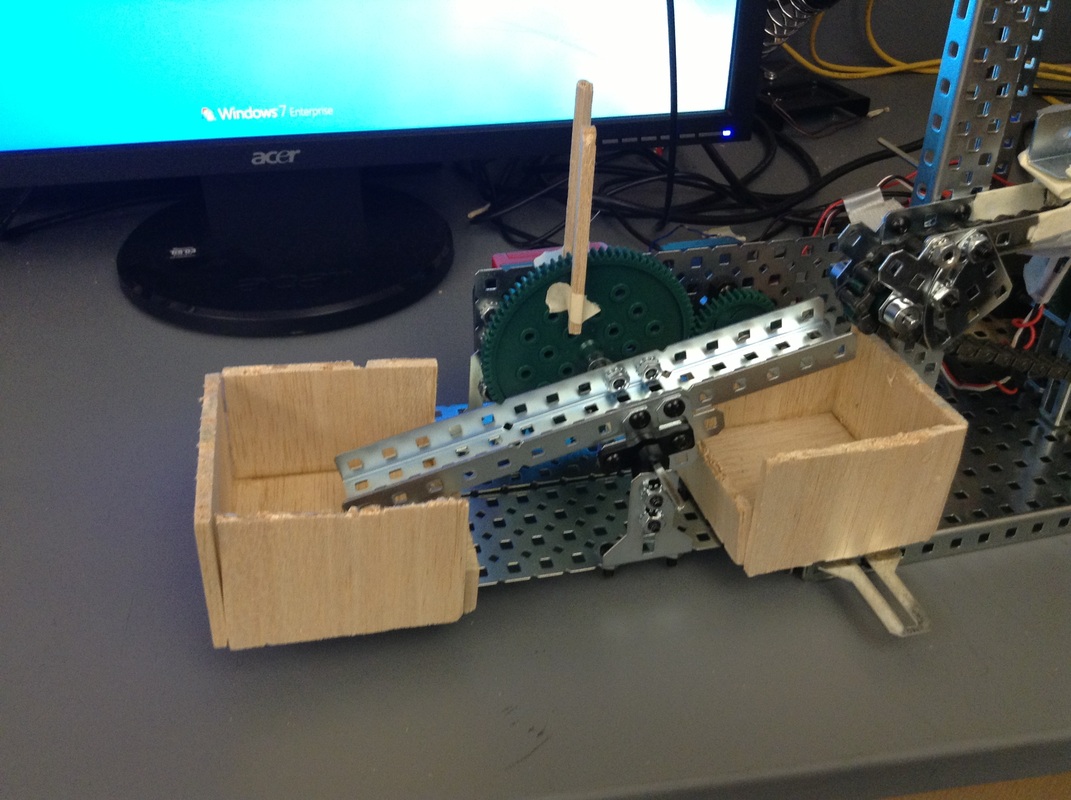
OPERATION:
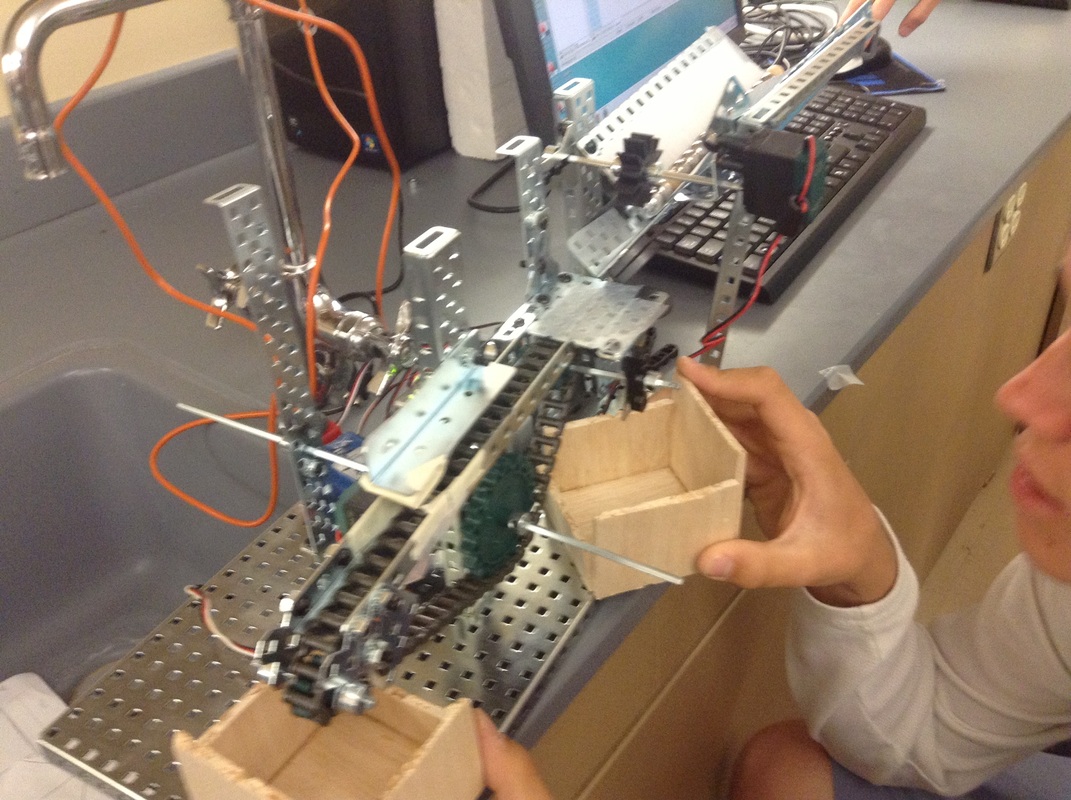
First, 15 (5 steel, 5 aluminum and 5 wooden) marbles are placed into the hopper. The start button is pushed and the machine begins operation. The dispensor releases one marble at a time, at a certain speed and at set intervals. The first marble is released. It then passes by the magnet. If it is a steel marble, the magnet will pull it off of the landing platform and into the steel marble bin. If it is not a steel marble, it goes across the landing platfrom and onto the conveyor belt. Once on the belt, the marble will pass through the conductivity sensor. If the marble is aluminum, electricity will flow through the marble completing the circiut and will register as a "1". If the marble is wood, then it will pass through the sensor and nothing will happen, the computer will continue to read this as a zero, and "nothing" will continue to happen. When the computer reads a "1", the arm will turn backwards and direct the aluminum marbles into the aluminum marble bin. The arm will then return back to its home position (angled towards wood bin). When the computer is not registering anything (wood marbles) the arm will be angled forwards in the home position and the wood marbles will be directed into the wood marble bin.
First, 15 (5 steel, 5 aluminum and 5 wooden) marbles are placed into the hopper. The start button is pushed and the machine begins operation. The dispensor releases one marble at a time, at a certain speed and at set intervals. The first marble is released. It then passes by the magnet. If it is a steel marble, the magnet will pull it off of the landing platform and into the steel marble bin. If it is not a steel marble, it goes across the landing platfrom and onto the conveyor belt. Once on the belt, the marble will pass through the conductivity sensor. If the marble is aluminum, electricity will flow through the marble completing the circiut and will register as a "1". If the marble is wood, then it will pass through the sensor and nothing will happen, the computer will continue to read this as a zero, and "nothing" will continue to happen. When the computer reads a "1", the arm will turn backwards and direct the aluminum marbles into the aluminum marble bin. The arm will then return back to its home position (angled towards wood bin). When the computer is not registering anything (wood marbles) the arm will be angled forwards in the home position and the wood marbles will be directed into the wood marble bin.
Going into the build, we were very confident in our design. Because of the time we spend going over designs and how everything would work together, we knew what we had to do and we did not have to spend a lot of time trouble shooting and coming up with new ideas.
The most challenging part of the build was trying to get the coding perfect. With the use of the arm in conjunction with the conductivity sensor, there was a lot of stuff that we had to teach ourselves as we went along.
Our sorter met all of the expectations. It was able to sucessfully sort all 15 marbles in half the required time limit.
Overall, I am extremely pleased with our final product. We were able to use a very unusual but highly effective technology (conductivity) successfully. The one drawback to our design was the magnet. It gave us A LOT of trouble, getting it position just right so that it was close enough to have an effect on the steel marbles, but not so close that the marbles stuck to it was a nightmare. Given more time and resources, I would have liked to use the second option that I mentioned in brainstorming. This would have been an electro-magnet that would pick up all the steel, all at once, move them over a bin and drop them into the bin. That would have gotten rid of 80% of our problems and would have much more interesting and reliable. But once again, I am very happy with our successful results.
